
A. Tiller: Deutscher Motorjachtbau 1900-1935
Von Artur Tiller, Charlottenburg.
In meinem Vortrag vom 22. November 1934 gab ich Ihnen in Wort und Bild einen historischen Überblick über die Entwicklung und Fortschritte des deutschen Segeljachtbaues der letztvergangenen fünfunddreißig Jahre. Heute werde ich versuchen, Ihnen die Entwicklung des Motorjachtbaues des gleichen Zeitraumes vorzuführen. Beide Vorträge ergeben also zusammengefaßt das Gesamtbild fünfunddreißig Jahre deutschen Jachtbaues.
Wegen beruflicher Überlastung habe ich aus dem heutigen Vortrag den Abschnitt „Motorschnellboote" abgesondert und ihn meinem Kollegen Henschke übergeben, der die Bearbeitung desselben in meinem Sinne übernommen hat.
Im Gegensatz zum Segeljachtbau liegen die Anfänge des Motorjachtbaues nicht weit zurück. Es läßt sich sogar noch mit Sicherheit das Geburtsjahr des ersten deutschen Motorbootes angeben. Vor etwa 50 Jahren erbaute der Erfinder des Benzinmotors, Gottlieb Daimler, auch das erste Motorboot. Gewiß, zuverlässig war die maschinelle Anlage dieses ersten Motorbootes bestimmt noch nicht; denn Daimler hatte erst kurz vorher seinen ersten, noch mit Oberflächenvergaser versehenen, ortsfesten Benzinmotor in Betrieb gesetzt. Einen solchen Benzinmotor baute er nun fast unverändert in den hölzernen Rumpf eines primitiven kleinen Bootes ein. Die Vergasung des Betriebsstoffes, die Herstellung des richtigen Gasgemisches und die Zündung desselben, machte damals sehr große Schwierigkeiten, von denen wir uns heute kaum noch einen richtigen Begriff machen können. Auch erwuchsen Daimler viele generelle Schwierigkeiten. Sein System des Benzinmotor-Antriebes blieb selbstverständlich nicht das einzige. Es tauchten in rascher Folge neue Motorentypen auf, die ebenfalls zum Bootsantrieb benutzt wurden. Dazu kam noch, daß der aus seinem angestammten Gebiet verdrängte Dampfmaschinenbau konstruktive Mittel suchte und fand, um schnell laufende Dampfmotoren und kleine Blitzkessel so auszuführen, daß sie mit dem neuen Benzinmotor im Bootsbetrieb erfolgreich den Wettbewerb aufnehmen konnten. Und hier war es hauptsächlich die dem neuen Benzinmotor im ersten Entstehen noch anhaftende Kompliziertheit des Aufbaues und vor allen Dingen seine Betriebsunzuverlässigkeit, die seine schnelle und begeisterte Aufnahme im Sportbetrieb verhinderten. Der unbedingt zuverlässige und bewährte Dampfmotor wurde in jenen Zeiten dem neuen Benzinmotor fast stets vorgezogen.
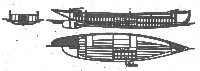
Bild l. Akku + Elektrisch angetriebenes Motorboot. L = 8.00 m; B = 1,65 m; Tfg. gr. = 0,50 m
Die Idee des elektrischen Bootsantriebes, trotzdem sie damals bereits durchaus zuverlässig war, hat dem neuen Benzinmotor dagegen weniger Abbruch tun können. Das leider auch heute noch sehr hohe Akkumulatorengewicht und der sich daraus ergebende, beschränkte Aktionsradius des Elektromotorbootes setzten seiner allgemeinen Ausbreitung fast unüberwindliche Hindernisse entgegen. Auch heute noch ist es dem Bootskonstrukteur unmöglich, ein Elektromotorboot mit Akkumulatorenkraftquelle so leicht und daher so schnell zu bauen wie etwa ein gleich starkes Benzinmotorboot, bei dem die Antriebskraft je PS etwa ein Drittel oder noch weniger wiegt (Bild l).
Die Entwicklung des Benzinmotorbootes hat aber doch bewiesen, daß Daimler auf dem richtigen Wege war. Nach Überwindung der ersten Kinderkrankheiten des Benzinmotors verdrängte dieser alle anderen Antriebsarten, auch den sonst so zuverlässigen, aber etwas umständlich zu bedienenden Dampfmotor. Nur im Großjachtbau hat sich auch heute noch der Dampfmotoren- und -turbinenantrieb erfolgreich behauptet. Sein ernstester Konkurrent ist auf diesem Gebiet allerdings nicht der Benzinmotor, sondern der Schwerölmotor.
Der Daimler-Benzinmotor war der erste brauchbare Bootsmotor. Auf ihn lassen sich alle anderen Motorenkonstruktionen, ferner die besten deutschen, französischen und englischen Bootsmotoren jener Zeit zurückführen. Er verdankt sein geringes Eigengewicht hauptsächlich seiner hohen Umdrehungszahl. Man kann rückblickend heute wohl sagen, daß die Verbrennungskraftmaschine entscheidend für den Entwicklungsgang des ganzen inneren und äußeren Aufbaues des neuzeitlichen Motorbootes gewesen ist. Heute ist es von den Verbrennungskraftmaschinen vor allem der Benzinmotor, der seines leichten Gewichts, seiner stetigen Betriebsbereitschaft und seiner einfachen Bedienung wegen im Motorbootsbau zur Verwendung kommt. Der Benzinmotor hat also auch die konstruktive Ausbildung und die Linienführung des neuzeitlichen Motorbootes ausschlaggebend beeinflußt.
Die Arbeitsweise des Daimler-Motors war die allgemein bekannte, von Otto, dem Schöpfer des Gasmotors, erstmalig angewandte Viertaktmethode.
Merkwürdigerweise hat sich das Zweitaktsystem im Jachtbau keinen Eingang zu verschaffen gewußt, trotzdem der Zweitakt-Leichtöl-Motor theoretisch annähernd die doppelte Leistung bei gleichem Hubvolumen und Motorengewicht ergibt, wie der Viertaktmotor. Der Daimler-Motor war ursprünglich nur zur Verarbeitung von Leichtöl, hauptsächlich Benzin, bestimmt. Um nun aus diesem flüssigen Betriebsstoff ein explosibles Gasgemisch herzustellen, mußte das Leichtöl vergast und in gasartiger Form mit Luft gemischt werden. Es würde zu weit führen, an dieser Stelle die Entwicklung des ersten, primitiven Oberflächenvergasers von Daimler und Benz bis zum neuzeitlichen Schwimmvergaser zu schildern. Nur soviel sei gesagt, daß es konstruktiv ein weiter und mühevoller Weg war, bis es gelang, für den schwierigen Bootsbetrieb unter allen Umständen und Witterungsverhältnissen für jeden Kolbenhub das richtige Gasgemisch bei sparsamstem Betrieb zu erzeugen.
Dasselbe läßt sich von der Entzündung des Gasgemisches sagen. Diese Entzündung erfolgte anfänglich nach Ottos Methode durch Berührung des Gasgemisches mit einer offenen Flamme, die im rechten Augenblick von einem besonderen Steuermechanismus freigegeben wurde. Solange die Umdrehungszahl eine gewisse, niedrige Grenze nicht überschritt, war diese Art der Zündung noch einigermaßen zuverlässig. Bei steigender Geschwindigkeit versagte sie aber. Man wandte dann als Zündquelle ein von außen durch eine Flamme erhitztes Röhrchen an, das in den Zylinderkopf eingesetzt war. Am Ende des Verdichtungshubs entzündete sich das Gasgemisch an den rotglühenden Wandungen des Zündröhrchens. Diese Zündeinrichtung der alten Benzinmotoren mittels Glührohrzündung hat sich nicht nur im stationären, sondern auch im Bootsbetrieb bis lange nach der Jahrhundertwende erhalten. Erst dann wurde die Glührohrzündung von der elektrischen Abreißzündung abgelöst. Die neuere Generation, die nur die elektrische Zündvorrichtung der Leichtölmotoren kennt, weiß kaum, daß der erste elektrische Zündapparat mit elektrischer Zündkerze erst im Jahre 1908 im Bootsmotorenbau angewandt worden ist.
Da der Explosionsmotor sich nicht wie die Dampfmaschine und der Elektromotor umsteuern läßt - es sei denn, daß man eine komplizierte Nockenwellenanordnung anwendet -, so erfordert er stets ein Wendegetriebe. Dieses für die Umsteuerung erforderliche Wendegetriebe hat ebenfalls erhebliche Wandlungen durchgemacht. Der anfängliche Riemenumtrieb wurde später durch Friktionsräder ersetzt, und erst die Jahrhundertwende brachte uns das heutige Kegelräder-Umsteuergetriebe; auch heute immer noch ein wunder Punkt im Motorbootsbetrieb.

Bild 2. Alte Motorjacht mit Naphthamotor und Barkassenheck.
Der in USA um die Jahrhundertwende so beliebte Naphtha-Bootsmotor hat in Deutschland als Antriebsmittel niemals eine Rolle gespielt. Die mir bekannt gewordenen deutschen Naphtha-Motorboote (s. Bild 2) waren m. W. aus der Schweiz bezogen, wo die Firma Escher, Wyss & Co. in Zürich sie nach amerikanischen Patenten erbaute. Als Kraftmaschine nahm der Naphthamotor zwischen dem Vergasermotor und dem Dampfmotor eine interessante Übergangsstellung ein. Der leider nicht ganz ungefährliche Betrieb ähnelte dem des Dampfmotors, da die Art, wie das Naphtha als Dampf wirksam gemacht wurde, diesem entlehnt war. Der Naphthamotor besaß die beiden Hauptvorzüge des Dampfmotors; er ließ sich überlasten und umsteuern, war aber leider etwas umständlich zu bedienen.
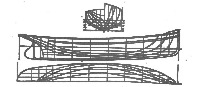
Bild 3. Linienriß eines alten Motorbootes in Barkassenform.
Es liegt in der Natur des menschlichen Schaffens, daß man für den Bootskörper der neu zu schaffenden Motorboote erst einmal die übliche Dampfbarkassenform übernahm. Diese bewährte Bootsform hielt sich sogar noch über die Jahrhundertwende hinaus. Bild 3 zeigt uns nun die Form eines solchen frühen Motorbootes im Barkassentyp. Erst nach 1900 setzten schüchterne Versuche ein, die Bootsform dem neuen, wesentlich leichteren Antriebsmittel, dem Benzinmotor, anzupassen. Die alte Dampfbarkassenform besaß im Verhältnis zu ihren Hauptabmessungen eine außergewöhnlich hohe Verdrängung. Eine solche war für sie auch Bedingung, da sich das Gewicht der Kessel- und Maschinenanlage auf rund 100 bis 130 kg je PS stellte. Ein derartig hohes Gewicht des Antriebsmittels erforderte selbstverständlich eine hohe Verdrängung, wie Bild 3 es ebenfalls zeigt.
Die ersten Benzinmotore waren bereits wesentlich leichter als eine gleichstarke Dampfmotorenanlage nebst Kessel und Zubehör. Zum Beispiel betrug damals das Gewicht eines 10-PS-Bootsmotors je PS etwa 45 bis 50 kg und das eines 15-PS-Motors 36 bis 40 kg. Noch im Jahre 1910 hielt der Motorbootskonstrukteur ein Gewicht von 30 bis 40 kg je PS für Motorkreuzer für durchaus angemessen. Dementsprechend besaßen diese Motorboote eine verhältnismäßig hohe Verdrängung und eine Spantform, die sich der der Barkassen annäherte. Dazu kam, daß der Gleichförmigkeitsgrad jener alten Bootsmotoren viel zu wünschen übrig ließ. Für kleine Leistungen wurde stets der l- und 2-ZyL-Motor und nur für größere Leistungen der 4-ZyL-Motor genommen. Der schlechteste Massenausgleich der hin und her gehenden Maschinenteile, besonders der der l- und 2-Zyl.-Motoren, erforderte starke Rumpfverbände, die ihrerseits erhöhend auf das Gesamtgewicht des Bootes wirkten.
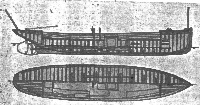
Bild 4. So sahen die offenen Motorboote um die Jahrhundertwende aus (Barkassentyp).

Bild 5. Kajütenmotorjacht um 1900. L = 10,60 m; B = 2,00 m.
In Bild 4 u. 5 sind Beispiele solcher frühen Motorboote zur Zeit der Jahrhundertwende dargestellt. Vergleichen wir sie mit den in Bild 6, 7 u. 8 dargestellten Motorbooten aus den Jahren 1905-1910, so ist klar ersichtlich, daß die Motorbootskonstrukteure bereits kurz nach der Jahrhundertwende anfingen, ihre eigenen Wege zu gehen. Sie waren bestrebt, nicht nur die Unterwasserform des Rumpfes, sondern auch das Äußere, nämlich das Oberwasserschiff mit seinen Kajütaufbauten vom Barkassentyp abzulösen. Das verringerte Gewicht des Benzin-Antriebsmotors ergab bereits um 1910 eine ganz wesentlich geringere Verdrängung bei gleichem Verhältnis von L : B. Das führte selbstverständlich zu einem geringen Tiefgang. Dadurch aber konnten wesentlich schlankere Wasserlinien angewandt und höhere Geschwindigkeiten erzielt werden, welche bisher mit der hohen Verdrängung gleich starker Dampfmotorboote nicht erreicht werden konnten.
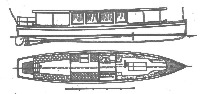
Bild 6. Alte Engelbrechtsche Motorjacht. (Glaskasten, 1910-1914).

Bild 7. Alte Engelbrechtsche Kajütmotorjacht. L = 8,00 m; B = 1,54 m.
Um nur ein Beispiel herauszugreifen: Eine 10 m lange Dampfbarkasse der ehemaligen kaiserlichen Marine der Klasse I aus dem Jahre 1900 wog komplett 8,5 t, wovon auf das leere Boot 2,2 t, auf Maschine und Kessel 3,96 t (2-Zyl.-Comp.-Maschine und Zylinderkessel mit durchschlagender Flamme) und der Rest auf Inventar, Kohlen und Besatzung entfiel. Die Maschine leistete 30 PS (wog also je PS 132 kg) und betrug die Bootsgeschwindigkeit 14,8 km/std. Dagegen erreichten die alten Engelbrechtschen Kajütmotorboote aus dem Jahre 1910 bereits mit einem 20-PS-Motor eine Geschwindigkeit von 15 km/std; weil ihre Verdrängung mit 3,6 t wesentlich geringer, Spantform und Wasserlinien aber wesentlich schlanker waren und bei gleicher Bootslänge eine viel geringere Verdrängung durch das Wasser zu treiben war.
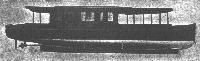
Bild 8. Das Mittelkajütboot dominierte um die Jahrhundertwende.
Die in England bis in die neuere Zeit hinein so beliebten Dampf-Motorboote, wie in Bild 9 ein solches 9,15 m langes Boot dargestellt ist, haben in Deutschland wenig Anhänger finden können. Selbst der hier angewandte Wasserröhrenkessel ergibt noch zu hohe Gewichte. Kessel- und Maschinenanlage müssen ihrer Schwere wegen im Verdrängungsschwerpunkt des Bootes aufgestellt werden, um eine Vertrimmung, bzw. extravagante Linienführung des Rumpfes zu vermeiden. Damit ist aber der beste Raum des Bootes für den Eigner verloren und sind die Personen in der hinteren Plicht von denen in der vorderen völlig getrennt. Die Kohlenbunker nehmen den Raum seitlich von Kessel und Maschine vollständig ein. Ob nun aber der Dampf damit für immer abgetan ist, kann nur die Zukunft lehren. In neuester Zeit sind von der Firma Henschel in Kassel Anstrengungen gemacht worden, den Dampfantrieb nicht nur im Automobil, sondern auch im Motorbootsbau wieder einzuführen. Gelingt es, den mit flüssigem Brennstoff gespeisten Brenner des Kessels seiner Kompliziertheit zu entkleiden und dennoch mit Sicherheit für jeden Kolbenhub die erforderliche Dampfmenge zu entwickeln, so ist es evtl. doch nötig, das obige Urteil über den Dampfbetrieb zu korrigieren.
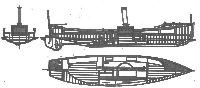
Bild 9. Englisches Dampfmotorboot (Jachtbeiboot). L = 9,15 m; B = 2,00 m; Ttg. gr. = 0,80 m.
In dem Glauben an eine Wiedereinführung des Dampfantriebes im Motorbootsbau wird man bestärkt, wenn man die Erfolge beobachtet, die bei größeren Schiffskesselanlagen mit sogenannten Zwangumlauf- oder La Mont-Kesseln gemacht werden.
Für den Motorjachtbau bemerkenswerte Vorschläge erscheinen auch die von Hüttner und Vorkauf, wonach ein umlaufender Kessel mit einer Turbine zu einer Einheit verbunden ist. Da bei solchen Anlagen alle Hilfsmaschinen und Regeleinrichtungen fortfallen und ebenso wie beim Leichtölmotor ein in sich geschlossenes Aggregat entsteht, würde man ohne besondere Schulung in der Lage sein, mit der Maschine umzugehen, was für den Motorbootsbau Voraussetzung ist. Wenn die räumlichen Vorteile so eintreten, wie sie ihre geistigen Urheber erwarten, und die betrieblichen Vorteile einer Dampfkraftanlage erhalten bleiben, so liegt ohne Zweifel auch im Jachtbau ein Anwendungsgebiet hierfür vor.
Die Entwicklung des deutschen Motorbootes in den Jahren 1910 bis 1914 war eine stetige, ruhige. Wesentliche Fortschritte in bezug auf Form des Bootsrumpfes und der Geschwindigkeit wurden nicht erzielt. Für alle bis 1914 erbauten Motorboote ist die bei ihnen angewandte DpIz.-Form bezeichnend. Das heißt, das Wasser wurde von einem möglichst schlanken, keilförmigen Vorschiff zerteilt (Bild 10) und dann im weiteren Verlauf zur Seite verdrängt.
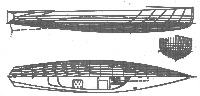
Bild 10
Die alte Deplacementform suchte Schnelligkeit durch Anwendung großer Länge und sehr geringer Breite zu erzielen. Das scharte, keilförmige Vorschiff zerteilte das Wasser und verdrängte es seitlich. Ein wesentliches Herausheben während der Fahrt, eine Deplacementverminderung, trat aber nicht ein.
Selbst die Mehrzahl der schnellen Rennboote bis zum Jahre 1910 war meistens nach diesem Prinzip entworfen. Nur ist bei ihnen das Verhältnis von L : B ganz ungemein gesteigert worden. Man trifft bis zum Jahre 1910 schnelle Motorboote an, deren Verhältnis von L : B = 6 bis 7,5 betrug. Allmählich gelang es auch, das Gewicht der Bootsmotoren erheblich zu verringern. Bereits in den Jahren 1905 bis 1910 besaßen wir Rennmotoren mit bis zu 500 PS. Dennoch gelang es nicht, selbst mit diesen riesigen Motoren unter Anwendung der alten DpIz.-Form die 65 km/std-Grenze zu überschreiten. Die Gründe dafür liegen klar auf der Hand. Die alten Rundspantboote waren in ihrem Unterwasserschiff derart geformt, daß sie selbst bei großen Geschwindigkeiten die gleiche Wassermenge verdrängten, wie in der Ruhelage. Das heißt, sie mußten die sich in der Ruhelage aus der Verdrängung und dem Verhältnis L : B ergebende eingetauchte Hauptspantfläche auch bei hohen Geschwindigkeiten durch das Wasser treiben. Ein langes schlankes Vorschiff und ein dementsprechendes fein geformtes Achterschiff nach Bild 10 erleichterten zwar das Zerteilen und den Abfluß der verdrängten Wassermassen. Aber die Grenze des Möglichen war doch bereits bei der 65 km/std erreicht und konnte selbst durch eine weitere Steigerung von L : B über 7 hinaus nicht erhöht werden. Gewiß ergab die Verteilung der Verdrängung auf einen in die Länge gezogenen, außerordentlich schlanken Rumpf von großem L und kleinem B (nach dem Prinzip „Länge läuft") eine sehr viel kleinere Fläche, als bei kürzeren und breiteren Booten. Aber mit der zunehmenden Länge wuchs auch die benetzte Oberfläche des eingetauchten Rumpfes. Solche extrem schmalen Boote waren zudem rank, unbändig und erforderten beim Ruderlegen einen großen Drehkreis. Sie waren ferner sehr teuer in der Anschaffung, da die extremen Rumpfverhältnisse besonders starke Längsverbände und ebensolche Motorenfundamente erforderlich machten, um ein Durchsacken der Bootsenden zu verhindern. Es zeigte sich zudem, daß Boote mit überhängendem Heck und sehr schlankem Achterschiff für größere Geschwindigkeiten ungeeignet waren.
Bereits bei 18 km/std sank das Hinterschiff sehr stark weg; es entstand eine große Heckwelle, deren Bildung ebenso wie das Festsaugen des Hinterschiffes einen großen Teil der Antriebskraft nutzlos verzehrte.
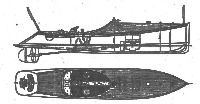
Bild 11. Biberschwanz-Heck in etwas modifizierter Form.
Erst kurz nach der Jahrhundertwende fand man durch Modellschleppversuche heraus, daß es unvorteilhaft sei, das Hinterschiff eines schnellen Motorbootes schlank und scharf als aufrechtstehenden Keil zu gestalten und daß es besser sei, diesen Keil flach zu legen und dementsprechend das Heck in eine flache, breite Bodenfläche zur WL auslaufen zu lassen. Derart entstanden nun Boote mit dem sogenannten „Biberschwanz", deren Vorschiff allerdings noch als aufrechtstehender Keil gestaltet war (Bild 11). Erst mit dieser Bootsform war es möglich, Geschwindigkeiten über 25 km/std ohne wesentliche achterliche Vertrimmung des Bootskörpers zu erreichen, da der breite, flache Biberschwanz das Einsinken des Hecks verhinderte. Später mit diesen Booten gemachte Erfahrungen lehrten aber, daß es nicht einmal nötig sei, den Biberschwanz in glattem Strak bis zur Wasseroberfläche zu führen. Man schnitt einfach einen Teil des Hecks ab, und baute einen senkrechten Spiegel ein, dessen Unterkante dadurch etwa 100 bis 200 mm in das Wasser eintauchte. Bereits bei einer Fahrtgeschwindigkcit von etwa 20 bis 22 km/std löst sich das Wasser ohne Sogbildung glatt vom Spiegel ab und bildet eine Furche von der ungefähren Form des Spiegels, die man als fehlende Fortsetzung des abgeschnittenen Hinterschiffes ansehen konnte.
Aber erst als man die das Wasser zerteilende Rundspantform der Kielboote mit keilförmigem Vorschiff gänzlich verließ und etwa um das Jahr 1905 zu der ein- bzw. mehrstufigen Gleitbootform mit flachem Boden überging, war man fähig, hohe Geschwindigkeiten von 100 km/std und darüber zu erreichen. Wir hatten gesehen, daß bei den bisherigen, rundspantigen Kielbooten das schlanke, einem aufrechtstehenden Keil gleichende Vorschiff das Wasser zerteilte, um es dann seitlich zu verdrängen. Die Trägheit des Wassers brachte es mit sich, daß sich bei größeren Geschwindigkeiten ein Teil dieser zu verdrängenden Wassermassen in Gestalt eines Wasserberges, der Bugwelle, vor dem Vorsteven staute. Die zur Bildung dieser Bugwelle sowie den sich daran anschließenden Wiederholungen, den Seiten- und Heckwellen, erforderliche Kraft ging für die Vorwärtsbewegung des Bootes glatt verloren. Das Hinterschiff hinterließ zudem eine Wasserfurche, welche etwa die Gestalt der eingetauchten, durchs Wasser zu treibenden 0-Fläche besaß, und bereits eine beim 0 beginnende Niveausenkung verursachte, in die das Hinterschiff hineinsackte. Die bei schnellfahrenden Kielbooten beobachtete Längsvertrimmung entstand durch diesen Stau des Wassers am Vorschiff und durch die Absenkung des Hinterschiffes.
Die etwa um 1905 auftauchende Stufenbootform brachte nun das völlig umwälzende Prinzip des an der Wasseroberfläche gleitenden Bootskörpers in den Motorbootsbau. Beobachtungen an Stufenbooten, die sich in voller Fahrt befinden, ergaben die Tatsache, daß der Rumpf das Wasser fast ganz verläßt. Es beträgt also die Wasserverdrängung in voller Fahrt nur einen geringen Bruchteil der Verdrängung der Ruhelage. Der fehlende Auftrieb ist hier durch hydrodynamische Kräfte des Wassers ersetzt. Diese entstehen, wenn der flache, in geringer Neigung zur Fahrtrichtung angestellte Boden des Bootes eine bestimmte Geschwindigkeit überschreitet. Der Druck der aufwärts gerichteten Komponente des schräggestellten, in rascher Fahrt gegen das Wasser geführten Bodens übersteigt bei einer bestimmten Geschwindigkeit das Bootsgewicht und hebt das Boot dadurch in seiner ganzen Länge so weit aus dem Wasser, bis das Gleichgewicht wieder hergestellt ist. Um dieses Gleiten an der Wasseroberfläche zu erreichen, ist nicht nur der Boden entsprechend dem soeben Gesagten auszubilden, sondern auch das Gesamtgewicht des betriebsfertigen Fahrzeugs möglichst niedrig zu halten. Nicht zuletzt gehört also zum Gleitboot ein Hochleistungsmotor von ganz geringem Eigengewicht, der den Rumpf schnell und sicher über die Gleitgrenze hinaus beschleunigt. In dem anschließenden Vortrag Henschkes wird dieser uns Näheres über den Zusammenhang von Form, Gewicht und Gleitgrenze der schnellen Stufenboote sagen. Das erste mir bekannte Gleitboot war die im Jahre 1908 von Tellier, Paris, erbaute „Rapiere III". Bei einer Länge von 8 m und einem 120 PS leistenden Pahard-Lavassor-Motor erreichte es etwa 59 km/std. „Rapiere III", ein Einstufenboot, löste sich in voller Fahrt abwechselnd mit dem ganzen Vorschiff steil vom Wasser ab, um dann kurz darauf wieder heftig aufzuschlagen. Aber auch diesen Übelstand wußte man durch eine geeignete Ausbildung der letzten Stufe zu verhindern. Während man noch bis zum Jahre 1910 annahm, daß das gleichmäßige Herausheben eines in voller Fahrt befindlichen Stufenbootes von dem Vorhandensein mehrerer Stufen abhängig sei, sind wir heute bereits imstande, dasselbe mit einer Stufenfläche zu erzielen. Die ersten Stufenboote vertrimmten gleich der „Rapiere III" noch sehr stark. Ihr himmelan ragendes Vorschiff war weder ästhetisch ein befriedigender Anblick, noch vom technischen Standpunkt aus wünschenswert. Durch besondere Formgebung des hinteren Teils der letzten Stufe und besonders durch zweckmäßige Verteilung der Gewichte, hauptsächlich des Motors, gelangte man aber bald dazu, diese ungünstige Vertrimmung schnellfahrender Gleitboote zu vermeiden und ein völlig paralleles Herausheben des Rumpfes, selbst bei höchster Fahrtgeschwindigkeit, bereits mit einem Einstufenboot zu erzielen (Bild 12).
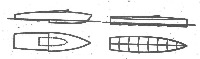
Bild 12. Ein- und Mehrstufengleitboote aus dem Jahre 1910.
Die Entdeckung dieses wichtigen Gleitbooteffektes war sicher der größte Fortschritt in den verflossenen 35 Jahren beim Bau sehr schneller Motorboote. Vergegenwärtigen wir uns einmal kurz das alte und das neue Prinzip:
Nach dem alten Prinzip suchte man die Geschwindigkeit mit rundspantigen Booten in der sogenannten DpIz.-Form zu erzielen. Wir hatten gesehen, daß diese Boote ein langes, keilförmiges Vorschiff und ein ebenso feines, lang ausgezogenes Achterschiff besaßen. Sie waren zudem bei großer Länge außerordentlich schmal und rank. Die Verdrängungsboote zerteilten das Wasser, das während der Fahrt zur Seite gedrängt wurde. Das Mittelschiff folgte gleichsam der dadurch entstehenden Öffnung im Wasser nach, welches sich dann, dem Verlauf des Hinterschiffes folgend, wieder schloß. Das durch das Wasser getriebene Verdrängungsboot erlitt also in der Hauptsache zweierlei Widerstände: den Formwiderstand, der durch das Zerteilen und Verdrängen der Wassermassen hervorgerufen wurde und den Reibungswiderstand. Der letztere hatte seine Ursache in der Reibung des Bootskörpers im Wasser, des Oberwasserschiil'es und der Aufbauten in der Luft. Daß das Zerteilen und Verdrängen der Wassermassen außerdem noch Wellenbildungen verschiedener Art zur Folge hatte, haben wir ebenfalls gesehen.

Bild 13. Der Name „Gleitboot" ist durchaus berechtigt. Der Rumpf berührt nur noch mit einem ganz kleinen Teil der hinteren Bodenfläche das Wasser. Im Wasser befinden sich nur noch Propeller und Ruder.
Während man früher nach dem Vorbild des Großschiffbaues annahm, daß der Reibungswiderstand den Form- und Wellenwiderstand überwiegt, so wissen wir heute, daß bei den relativ kurzen Bootslängen der sehr hohe Geschwindigkeiten entwickelnden Verdrängungsboote, der Form- und Wellenwiderstand den Reibungswiderstand bei weitem überwiegt. Nach dem neuen Gleitprinzip wird nun der Hauptwiderstand der alten Verdrängungsboote, der Form- und Wellenwiderstand, fast gänzlich ausgeschaltet. Die schnellsten Gleitboote verdrängen kein Wasser mehr, da der mit riesiger Geschwindigkeit über das Wasser gleitende, schräg gestellte, flache Boden dem Wasser gar keine Zeit zum Ausweichen läßt. Das Wasser reagiert auf den Bodendruck des Bootskörpers erst, nachdem dieses bereits weitergeeilt ist. Nebenstehende Photos zeigen uns diesen Vorgang zur Genüge. Nur die Schraube befindet sich noch in massivem Wasser, und in diesem Umstand, der fast gänzlichen Ausschaltung des Form- und Wellenwiderstandes, liegt auch die Lösung des Problems, warum Gleitboote mit viel geringerer PS-Zahl wesentlich höhere Geschwindigkeiten als die alten Verdrängungsschnellboote erreichen. Verdrängungsboote gelangen auch durch den Einbau stärkster Antriebsmotore nicht zum Gleiten. Durch Erhöhung der Antriebskraft wird bei ihnen die Wellenbildung nur ins Maßlose getrieben, ohne daß ein der vermehrten Antriebskraft entsprechender Geschwindigkeitszuwachs erzielt wird. In den Ausführungen des anschließenden Vertrages über Motorschnellboote werden wir allerdings ersehen, daß ein Gleitboot unterhalb der Gleitgrenze wie jedes Verdrängungsboot i m Wasser fährt. Es erleidet dann aber größeren Verdrängungswiderstand als das letztere, da ja seine Rumpfform nur für Gleitzwecke entworfen ist. Das prägt sich deutlich in den Widerstandskurven für Verdrängungs- und Gleitboote aus.
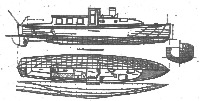
Bild 14. Rundspantige Motorjacht.
Konstrukteur: Artur Tiller. L =: 13,00 m; U = i,20 m; T = 0,83 m; Gewicht = 3,5 t; Motor 45/60 PS; V = 25 km/std.
Die Erfolge des Gleitprinzips führten nun dazu, dieses möglichst auch in der Konstruktion schneller, rundspantiger Motorkreuzer, Limousinen und Autoboote einzuschalten. Man strebt also heute auch bei rundspantigen Booten eine mehr oder minder große Verdrängungsverminderung bei voller Fahrt an und bildet dementsprechend den Boden dieser Fahrzeuge derart aus, wie es beispielsweise Bild 14 zeigt. Es ist selbstverständlich, daß man mit dem relativ hohen Gewicht dieser Fahrzeuge niemals den reinen Gleiteffekt erzielen kann. Den reinen Gleiteffekt will man aber auch gar nicht erzielen, da der schnelle Motorkreuzer eine gewisse, dem Stufenboot in seiner normalen Form gänzlich mangelnde Seetüchtigkeit auf weisen muß. Das hohe Gewicht dieser Kreuzer würde auch niemals die Anwendung des Gleiteffektes gestatten. Aber man versucht doch durch geschickte Ausbildung der Bodenform dieser rundspantigen Boote eine mehr oder minder große parallele Austauchung, also eine Verdrängungsverminderung in voller Fahrt zu erzielen. Dadurch vermindert man den Form- und Wellenwiderstand. Dieser Umstand bringt es mit sich, daß theoretische Geschwindigkeitsformeln, welche die eingetauchte Fläche in Rechnung setzen, bei diesen Booten nicht angewandt werden dürfen. Diese Formeln ergeben leider ungenaue, d. h. zu große Resultate, da ja in Fahrt die eingetauchte Fläche sich durch den mehr oder minder austauchenden Rumpf wesentlich verringert.
Leider ist zur vollen Erreichung des Gleiteffektes eine theoretisch glatte Wasseroberfläche erforderlich. Im Seegang verliert dementsprechend das normale Stufengleitboot erheblich an Geschwindigkeit. Es beginnt dabei übel zu springen, da bei den Unebenheiten der Wasseroberfläche im Seegang sich der hydrostatische Druck auf den flachen Bootsboden unregelmäßig ändert. Dieses Springen kann sogar zum Zerschlagen des ganzen Bootes führen, wenn man es bei hartem Seegang mit einer zu hohen Geschwindigkeit dagegen anlaufen läßt. Das ist auch der Grund, daß der reine Gleiteffekt in der Konstruktion von Seekreuzern bis heute noch keine Anwendung gefunden hat. Der große, schwere Seekreuzer ist also die einzige Sportboottype, deren Entwurfsgrundlagen von dem Gleiteffekt nicht berührt, seit der Jahrhundertwende bis jetzt unverändert geblieben sind.
Sind die Hauptabmessungen einer Motorjacht bestimmt, so hängt die Form des Rumpfes nur von der Spantführung ab. In dieser Beziehung hat nun die Jahrhundertwende große Umwälzungen gebracht. Die wichtigste, das kastenförmige Spant der flachbodigen Stufenboote haben wir bereits kennengelernt. Das Stufenboot brachte uns aber nicht etwa eine beliebige neue Spantform, sondern durch die Schrägstellung der Bodenfläche den umwälzenden Gleiteffekt. Andere Formen, so z. B. die von Amerika übernommene V-Bodenform (Bild 15), sollten im Haupteffekt einzig und allein die Baukosten des teuren, rundspantigen Bootskörpers herabsetzen. Diese erstrebte Verbilligung wurde auch wirklich erzielt. Nur mußte man dabei das nach deutschen Begriffen häßliche Aussehen, woran andere Nationen sich aber ganz und gar nicht stießen, mit in Kauf nehmen. Recht bald entdeckte man aber, daß sich mit einer etwas geänderten V-Bodenform der Gleiteffekt ebenfalls erreichen läßt, wenn man bereits die ersten Vorschiffsspanten stumpfwinklig gestaltete und die übrigen, sich daran anschließenden Spanten dem Spiegel zu allmählich flach auslauten ließ. Also nur das Vorschiff besitzt bei diesen Booten noch die reine V-Spantform. Derartige stufenlose V-Bodengleitboote müssen natürlich genau wie die Stufengleitboote äußerst leicht im Rumpf und der Maschinenanlage gehalten sein. Schwere Seekreuzer in V-Bodenform haben dagegen auch im Mittel- und Achterschiff scharfe, V-förmige Spanten. Sie sind den rundspantigen Booten in keiner Weise in bezug auf Seetüchtigkeit unterlegen. Ihr Vorzug diesen gegenüber liegt in ihrer Billigkeit, der Nachteil in ihrer Häßlichkeit.
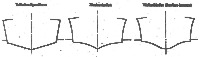
Bild 15. : Links V-Bodenspantform, Mitte Konkavboden, rechts Wellenbinder (konkav-konvex)
Eine weitere Spantformvariation ist die abgewandelte V-Form mit konkav gekrümmten, also hohlen Bodenspanten nach Bild 15. Eine Anzahl deutscher Konstrukteure bevorzugt sie gegenüber der reinen, geradlinigen V-Spantform. Bei gleicher Bootsbreite und Sponungstiefe ergibt sie die für leicht gebaute Autoboote, Limousinen und Expreßkreuzer so erwünschte geringe Verdrängung. Derartige Boote setzen zudem etwas weicher in den Seegang ein und haben eine etwas größere Stabilität der Form bei etwas geringerem Bootsgewicht, wie die V-Bodenform.
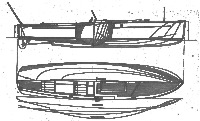
Bild 16 a. 8 m Autoschnellboot in Wellenbinderform. Konstrukteur: Schiffbau-Ing. A. Tiller. Erbauer: Werft Kriegemann. L = 8 m, B = 1,7 m, Gewicht: 2 t, Motor: 50 PS, V = 30 km/h

Bild 16 b. Bauplan des 8 m Autoschnellbootes
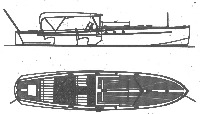
Bild 16 c. Profil- und Deckplan
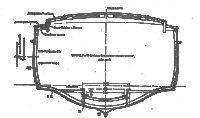
Bild 16 d.Hauptspant des 8m Autobootes

Bild 16 e. Autoschnellboot "Schelm"

Bild 16 f. Autoschnellboot "Schelm"
Ein ganz wesentlicher Gewinn war dann noch die sogenannte Wellenbinderform, deren charakteristisches Merkmal eine konkav-konvexe Spantform des Bodens ist (Bild 16). Sie findet weitgehende Anwendung bei Schnellbooten, Autobooten, Limousinen und leichten, schnellen Motorkreuzern. Wir können sie uns aus der konkaven V-Bodenform entstanden denken. Die Wellenbinderform, richtig durchkonstruiert, sichert zudem unbedingte Seetüchtigkeit, selbst für größere, schnelle Expreßkreuzer, die es allerdings nur noch in dem reichen Amerika gibt. Wie wir aus dem anschließenden Vortrag über Schnellboote ersehen werden, läßt sich mit dem stufenlosen Wellenbinderrumpf auch ein vorzüglicher Gleiteffekt erzielen. Nur ergibt die Wellenbinderform im Gegensatz zur Rund- und V-Spantform für große und schwere Motorseekreuzer ungünstige Resultate. Ihre Anwendungsmöglichkeit findet hier also eine Grenze. Trotzdem aber ist ihr Anwendungsgebiet weit umfangreicher als das der Stufenbootsform, die sich nur für ausgesprochene Schnellboote mit Erfolg verwenden läßt.
Dagegen ist es nur zu begrüßen, daß das kastenförmige, stufenlose Scharpiemotorboot, das kurz nach Kriegsende als das Nonplusultra der Billigkeit angepriesen wurde, heute von keiner Jachtwerft von Ruf und Namen mehr gepflegt wird. Derartige wasserdichte Holztröge haben nichts Schiffbauliches mehr an sich. Sie sind beides, schlecht in bewegtem Wasser und häßlich im Aussehen.
Eine andere interessante Bootsform, die des in Amerika sehr beliebten Seeschlittens, hat sich leider in Deutschland nie einführen lassen. Da also hier Erfahrungen fehlen, ist es mir nicht möglich. Ihnen über die Seeschlittenform, die angeblich nicht nur schnelle, sondern auch seetüchtige Boote ergeben sollen. Näheres mitzuteilen. Sie ergibt äußerlich sehr häßliche, kastenförmige Fahrzeuge in umgekehrter V-Bodenform mit nach dem Achterschiff flach auslaufenden Spanten.
Als Baumaterial werden im Jachtbau nach wie vor zur Hauptsache Edelhölzer und einheimisches Laubholz benutzt. Zur Zeit der Jahrhundertwende glaubte man, daß das Holz binnen kurzem vom Schiffbaustahl im Jachtbau ebenso verdrängt würde, wie das bereits im Großschiffbau zu jener Zeit geschehen war. Aber man täuschte sich in dieser Annahme; denn die eleganten Schiffsformen einer Segel- und Motorjacht lassen sich in Holz besser wiedergeben als in Stahl. Es stellte sich sehr bald heraus, daß der Schiffbaustahl für Jachten unter 12 bis 15 m Deckslänge doch ein zu sperriges Material ist. Trotz bester Werkmannsarbeit wirken aus Stahl gebaute kleinere Jachten im Äußeren steif und sperrig. Es fehlt ihnen das elegante Äußere der Edelholzbauten.
Ich glaube, Ihnen hiermit in kurzen Zügen ein Bild der Entwicklung des Motorbootes in den letzten 35 Jahren gegeben zu haben. Ich habe nicht so sehr die Äußerlichkeiten der verschiedenen Bootsformen hervorgehoben, sondern vor allen Dingen auf die Ausarbeitung der konstruktiven Umwälzungen Wert gelegt. Die Formenentwicklung erstreckt sich, wie wir gesehen haben, von der alten Barkassenform (Bild 3) hinüber zum Engelbrechtschen Glaskastenboot aus den Jahren 1900 bis 1914 (Bild 6 bis 8) ; weiter über den reinen Backdecker der Nachkriegsjahre (Bild 17) bis zum modernen Motorboot.
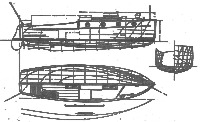
Bild 17 a. 7,00 m-Backdeckkreuzer. (Kleinster, praktisch noch brauchbarer Backdeckkreuzer.) Konstrukteur: Schiffb.-Ing. A. Tiller, Charlottenburg. L = 7,00 m; B = 2,00 m; T = 0,55 m.
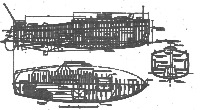
Bild 17 b. Bauplan des 7,00 m-Backdeckkreuzers.
Von diesen letzteren möchte ich Ihnen nun noch einige der wichtigsten Typen vorführen, um Ihnen ein Bild von dem derzeitigen Stand des Motorbootsbaues zu geben.
Zu den kleinsten Motorbootstypen zählen die Autbordboote. Bild 18 zeigt einen typischen Vertreter dieser kleinen Klasse. Das Autbordboot ist verhältnismäßig jungen Datums. Es erfreut sich seiner grotesken Form, seiner Schnelligkeit und Billigkeit halber einer steigenden Beliebtheit. Viele Tausende solcher Autbordboote bevölkern bereits heute unsere Binnengewässer.
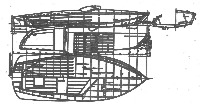
Bild 18a. Außenbord-Gleiter. Konstrukteur: H. Tapken. L = 4,40 m; B» = 1,50 m; SH == 0,50 m.

Bild 18b.Autoboot in Wellenliiinlerform. 1925 erbaut. Tiller. Werft Lepp.
Als etwa um 1920 der Außenbordmotor anfing aus dem Versuchsstadium herauszutreten, benutzte man ihn anfänglich nur als Kraftquelle für Beiboote gewöhnlicher Form. Aber bald stellte sich heraus, daß sich mit diesen leichten und doch leistungsfähigen Motoren große Geschwindigkeiten erreichen lassen, wenn man einen geeigneten Bootskörper verwendet. So entstand dann das typische Einstufen-Autbordboot, wie Bild 18 es uns zeigt. Anfänglich nicht besonders von Schönheit geplagt, wirken sie heute durch das Groteske ihrer Gestalt durchaus ansprechend.
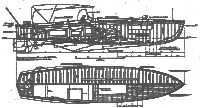
Bild 19a. 7,00 m-Autoboot (rundspantig, Deplacementform). Konstrukteur: Artur Tiller.
Bild 19b. Reihenautoboote im Bau. (Konstrukteur: Tiller. Werft: Burmester.) RiB siehe Bild 19a.
Ebenfalls einer riesigen Verbreitung erfreut sich das moderne Autoboot nach Bild 19 u. 20. Es ist aus dem offenen Motorboot (Bild 4) entwickelt worden und wird in Holz und Stahl als rundspantiges Boot, aber auch als Wellenbinder (Bild 16) sowie als V-Spantboot gebaut. Autoboote werden mit Motoren von verschiedensten Stärken ausgerüstet, und beträgt dementsprechend die von ihnen erreichte Geschwindigkeit etwa 12 bis 50 km/std. Eine genaue obere Grenze gibt es bei ihnen nicht. Sie gehen nach oben allmählich in die reinen Schnellboote über. Bild 21 zeigt uns ein aus Stahl außerordentlich stark gebautes Autoboot in Wellenbinderform für das rauhe Wasser der Unterelbe. Dem Zweck entsprechend ist es mit einem schweren, aber soliden Antriebsmotor versehen. Dieses Autoboot erreichte trotz seiner hohen, etwa 2 t betragenden Gesamtverdrängung mit einem 50-PS-Motor etwa 31,5 km/std.
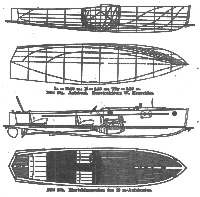
Bild 20a und 20 b) 10 m Autoboot, Konstrukteur W. Henschke, unten Einrichtungsplan

Bild 21. 8 m-Auto-ScIineIlboot. Tiller. Werft Kriegermann.
Bild 22 zeigt uns einen weiteren, auf Binnengewässern sehr verbreiteten Motorbootstyp, die Limousine. Dieser Entwurf entstand am Jahre 1919 und kann auch heute noch als zweckmäßig und formenschön gelten. Die Limousine ist eigentlich nur ein vergrößertes, schnelles Autoboot mit fester Kajüte. Diese Kajüte bietet bei schlechtem Wetter einen Unterschlupf und zur Not auch Übernachtungsmöglichkeit.
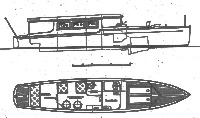
Bild 22. 9,00 m-Limousine. Konstrukteur: Ing. Artur Tiller. L = 9,25 m: B = 1,80 m; Tgr = 0,75 m.
Der alte Engelbrechtsche Glaskastenkreuzer wurde in den Jahren 1914 bis 1918 vom Backdeckkreuzer (Bild 17) abgelöst. Der Backdecker wurde anfänglich stark von amerikanischen Vorbildern beeinflußt. In den Jahren 1918 bis 1930 beherrschte er fast ausschließlich das Feld der kleinen Kreuzer in der Größe von 7 bis etwa 12 m Deckslänge. Aber auch er genügte den heutigen Schönheitsanforderungen nicht mehr. Bereits um 1928 fing man an, ihn mit einer Achterkajüte und festem Wetterdach nach Bild. 23a umzugestalten. Die Achterkajüte sollte nicht nur den Wohnraum mehren, sondern auch in ästhetischer Beziehung dem zu massig wirkenden Backdeck ein Gegengewicht geben.

Bild 23 a. Profil eines 10.00 m-Backdeckes mit Achterkajüte und geschütztem Steuerstand. L=10 m; B = 3,25 m; Tgr = 0,76 m; Motor = 35/40 PS.

Bild 23 b. 10,50 m-Backdeckkreuzer „Greif". Konstrukteur: A- Tiller. L = 10,50 m: B = 2,40 m; Tgr = 0,75 m; G = 4,00 t; Motor = 40 PS; V = 21,5 km/std.

Bild 23c. 10,50 m-Backdeckkreuzer „Greif", (Der Konstrukteur am Ruder.)
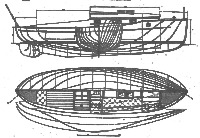
Bild. 24 a. Seetüchtiger kleiner Motorkreuzer für den La l'lata. Konstrukteur: Ing. Artur Tiller. L = 8.25 m; B = 2.25 m: Tfg gr = 0,71 m, Dpl = 3.01 t.
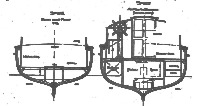
Bild 24 b. Spantquerschnitt des kleinen Motorkreuzers.
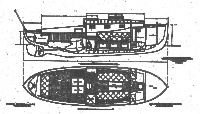
Bild 24 c. Bauplan des kleinen Seekreuzers für den La Plata
Bild 24 d. Der Rumpf des kleinen Backdeckers für den La Plata. (Konstrukteur: A. Tiller.)
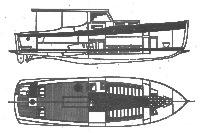
Bild 25. 9,35 m-Motorkreuzer. Konstrukteur: H. Tapken. L = 9,35 m, B = 2,65 m, Verdr.: 3,5 t, Motor: 50 PS, V = 19 km/h
Das führte dann zu dem in Bild 26 dargestellten Motorbootstyp mit vorn abgesetzter Kajüte und dementsprechend glatt durchlaufenden Scheerstrak. In Bild 24 u. 25 sehen wir zwei kleine Vertreter dieses neuen Typs; der eine ist für Binnengewässer, der andere für rauhes Wasser bestimmt. Bild 26 u. 27 zeigen zwei größere Boote, während Bild 28 einen schweren Seekreuzer dieser Art darstellt.
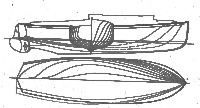
Bild 26 a. 10 m Küstenkreuzer. Konstrukteur: Ing. A. Tiller. L = 10 m, B = 2,55 m
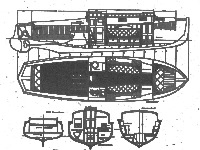
Bild 26 b. Bauplan und Spantquerschnitt des Küstenkreuzers
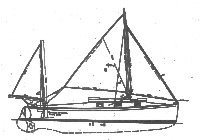
Bild 26 c. Segelriß des 10 m-Küstenkreuzers. M = ca. l : 100. Großsegel = 10. qm, Vors. = 6,25 qm; Treiber == 3,50 qm'; Gesamt = 19.75 qm.
Eine ausgesprochene Kreuzerjacht für Binnengewässer zeigt Bild 29. Es ist eine Motorbootstype, die von 11 bis 18 m. Deckslänge für unsere großen deutschen Binnengewässer unentbehrlich zu sein scheint. Die geschlossene Mittelkajüte bietet allen Komfort, dessen man auf Langfahrten nur irgend bedarf. Unter dem Backdeck läßt sich dann zwanglos der Mannschaftsraum unterbringen. Der nur wenig versenkte Steuerstand ermöglicht eine tadellose Übersicht auch über das rückwärtige Fahrwasser, während der darunter eingebaute Motor durch ein großes Luk bequem zugänglich ist.
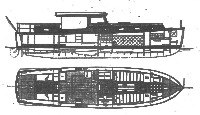
Bild 27. 10,ü0 m-Binnenkreuzer mit Achterkajüte und geschlossenem Steuerstand. L = 10,25 m; B = 2,58 m; Tfg = 0,70 m. Konstrukteur und Erbauer: Jachtwerft Klaus Engelbrecht.
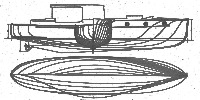
Bild 28 a. Ostsee-Motorkreuzer. Konstrukteur: Ing. A. Tiller. L = 12 m, B = 2,5 m, Tfg gr. = 0,91 m, Deplacement: 6 t, Innenballast: 1,3 t
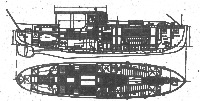
Bild 28 b. Bauplan des Ostsee- Motorkreuzers
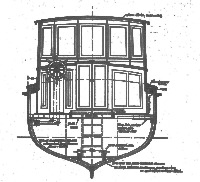
Bild 28c. Hauptspant des Ostsee-Motorkreuzers.

Bild 28d. Diese Backileuker sinil sciir häufig auf Binnengewässern anzutreffen. Konstrukteur: Ing. A. Tiller.

Bild 28 e. 12 m Binnenmotorkreuzer. Konstrukteur: W. Henschke
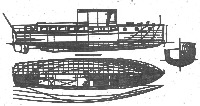
Bild 29a. 12,00 m-Binnenmotorkreuzer. Konstrukteur: Schiffb.-ing. Artur Tiller. L = 12,00 m; B = 2,5O m; T = 0,80 m; Fb = 1,40 m; Verdr = 5,00 t.
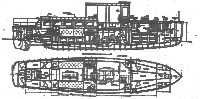
Bild 29b. Bauplan des 12m-Binnenmotorkreuzers.
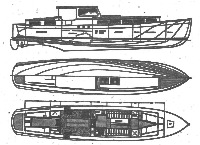
Bild 29c. 14,00 m-Motorkreuzer für große Binnengewässer. Konstrukteur: H. Tapken, Berlin-Grunew.ild.
L = 14,00 m, B = 2,80 m, T = 1.00 m, Verdr = 8,20 t.
Mit 55 PS-Motor = 16,1 km/std, mit 85 PS-Motor = 1B.8 km/std, mit 110 PS-Motor = 22,7 km/std, mit 160 PS-Motor 25,5 km/std.
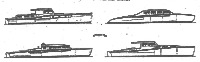
Bild 29 d. Vier Vorentwürfe zum 16,00 m-Moforkreuzer für größere Binnengewässer.
Von Harold Tapken
Aus dem Backdecker ist der Deckhauskreuzer erwachsen. Wir finden ihn in den nachfolgenden Rissen, Bild 30, dargestellt. Der Rumpf des Deckhauskreuzers ist oft mit einer sehr lang ausgezogenen Back versehen. In dem Dieselmotorkreuzer „Elisabeth" sehen wir den Deckhauskreuzer in der Reinkultur entwickelt. Die Lürsenkreuzer dieser Größe geben ebenfalls eine vorzügliche Darstellung dieses Motorbootstyps, der von 14 m bis 30 m Deckslänge gebaut wird. Einen Lürsen-Deckhauskreuzer von 27 m Länge finden wir z.B. auf Tafel XIX des Tillerschen Buches „Motorboote und Motor Jachten"1).
In Bild 31 endlich ist ein fast 30 m langer Motorkreuzer mit Jachtheck, ein Entwurf vom Jahre 1922, wiedergegeben. Die ruhige, elegante Linienführung dieser schönen Motorjacht erinnert unzweifelhaft an die alten Dampfjachten, während diese letzteren merkwürdigerweise in ihrem äußeren Aufbau sich mehr den Motorjachten nähern.
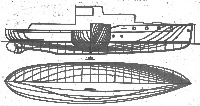
Bild 30 a. 18 m Diesel-Motorkreuzer "Elisabeth". Konstrukteur: Ing. A. Tiller. L = 18 m, B = 3,86 m, T = 1,5 m, V = 20 t,
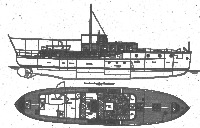
Bild 30 b. Einrichtungsplan der "Elisabeth"
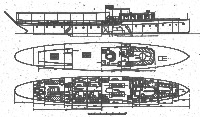
Bild 31. Doppelschrauben-Seekreuzer mit Dieselmotoren. Konstrukteur: Ing. A. Tiller. L = 28,5 m, B = 4,45 m, Verdr. 40 t
Ich würde mich freuen, wenn Ihnen meine Ausführungen einen guten Überblick über die Entwicklung des deutschen Motorjachtbaues gegeben haben.
Sodann gestatte ich mir, dem Vorstand der STG noch im Namen der selbständigen Jachtkonstrukteure den verbindlichsten Dank auszusprechen. Besonders Herrn Geheimrat Schütte und Herrn Professor Laas verdanken wir es, in der STG eine Heimstätte gefunden zu haben. Nicht nur im Großschiffbau, sondern auch im Segel- und Motorjachtbau harren noch eine ganze Reihe wichtiger Probleme, die der einzelne allein nicht bewältigen kann, der Lösung. Die erforderlichen Versuche können nur unter der Mithilfe der STG gedeihen. Bedenkt man nun, daß der Seglernachwuchs für die Qualität der seemännischen Besatzung unserer Kriegsschiffe sehr wertvoll ist und ferner, daß unsere schnellen Motorjachten außerordentlich befruchtend auf die Konstruktion schneller, kleiner Marinefahrzeuge eingewirkt haben, so wird meine Bitte um Berücksichtigung hoffentlich nicht vergeblich sein.
Anmerkungen:
1) „Motorboote, Motorjachten und ihre maschinelle Einrichtung" von Schiffbau-Ing. A. Tiller. Verlag R. C. Schmidt, Berlin.
2) Siehe den Vortrag Dir. Emmerlich: ..Große Motorjachten". STG-Jahrbuch 1932.
(Erörterung folgt hinter Vortrag Henschke auf S.577.)